ROS (Robot Operating System) es un framework o marco de trabajo de código abierto diseñado para desarrollar software para robots. Proporciona servicios para ayudar en la creación de aplicaciones, incluyendo abstracciones de hardware, controladores de dispositivos, herramientas de visualización, bibliotecas de percepción, planificación de movimiento, localización mapeo y comunicación entre procesos. Con ROS, los desarrolladores pueden construir sistemas robóticos complejos en poco tiempo y aprovechar al máximo una comunidad activa y en crecimiento que contribuye todos los días con nuevos paquetes de software y herramientas de desarrollo para aplicaciones robóticas.
En este workshop intensivo vamos a introducirnos en el ecosistema ROS2 Humble Hawksbill. Veremos de forma teórica y práctica los principios de funcionamiento ROS2 y cómo puede ayudarnos dentro del mundo de la Robótica a conectar distintos hardwares con softwares o diferentes softwares entre sí. Al final del taller, los participantes deberían tener una comprensión global sobre cómo utilizar ROS2 para desarrollar sus propias aplicaciones y estar preparados para continuar explorando y ampliando sus conocimientos sobre ROS.
Clase 2: Programación usando ROS2; Topics y services en C++ y Python. Uso de Colcon. Calidad de servicio. Configuración del IDE. Uso de RVIZ. Uso de Package. Herramientas de depuración en ROS mediante la herramienta rqt graph. Ejercicio: Salir de un laberinto utilizando lidar 2D.
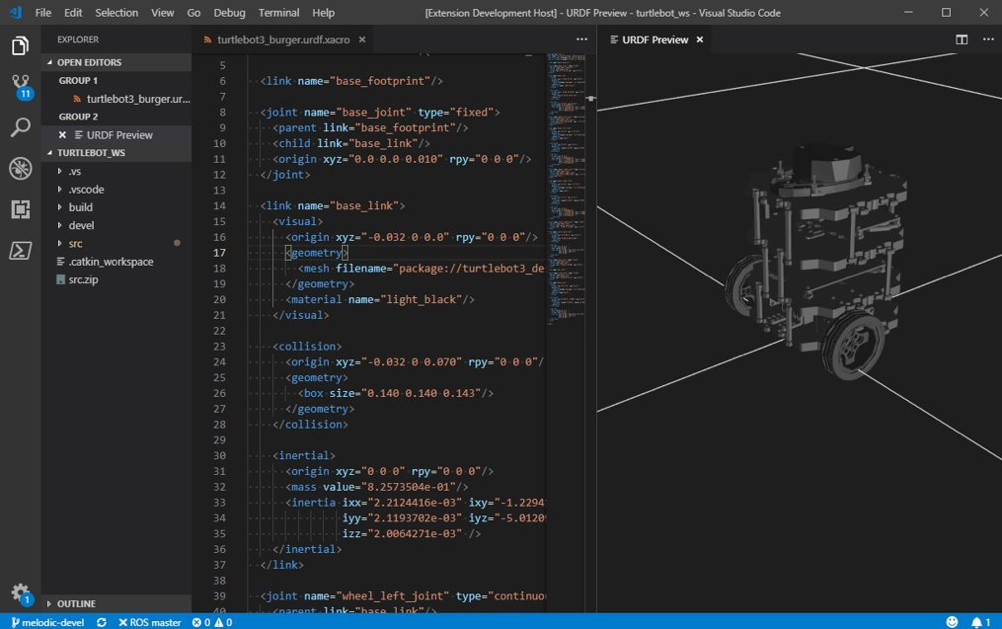
Clase 3: Dataset en ROS2; Biblioteca de transformaciones tf2. Introducción a los archivos URDF. Uso de datasets mediante Rosbag2. Uso de launch file mediante XML y Python. Ejercicio: Publicar la transformación tf de un robot, publicar el camino realizado para verlo desde el visualizador Rviz y grabar todos los topics en un Rosbag2.
Clase 4: ROS2 en la vida real; Introducción a los ROS Packages. Introducción al Package NAV2. Utilización de otras bibliotecas de terceros. Ejercicio: Utilizar NAV2 y otras bibliotecas para resolver el problema del laberinto.
Clickee aquí para completar el formulario de preinscripción al taller de ROS2








 Contacto :
Contacto :